East Devon PIrates
Visit our blog (opens in a new tab)email us at: infoAATTeastdevonpiratesDDOOTTorg
What have we been up to ...
PI WARS 2024
We came 9th out of 12 in the Advanced category. Not bad for our first time in Cambridge. We had trouble with robustness (the robot gets bashed around a LOT!) and with keeping the batteries charged (the organisers want you to recharge outside in the cold), but the basic design proved itself and the most elaborate attachment (Nerf gun) worked fine eventually after a fraught search for a loose wire.Pi Noon
The most visually spectacular challenge is Pi Noon:Zombie Apocalypse
The Zombie Apocalypse was a bit tricky, as we had 'calibrated' the laser pointer by aiming a bit to the left and down from the dot, but at the venue we discovered that that was a hole, so you couldn't see the dot! Still, we shot a couple of zombiesMinesweeper
Needs fast driving to defuse the mines by stepping on the lit squaresLava Palaver
A slow motion car crash! We had to use the wall-follower program from Escape Route when the challenge is really designed for line followers, but we got some points anyway!Making ZyderBot 10 Time Lapse
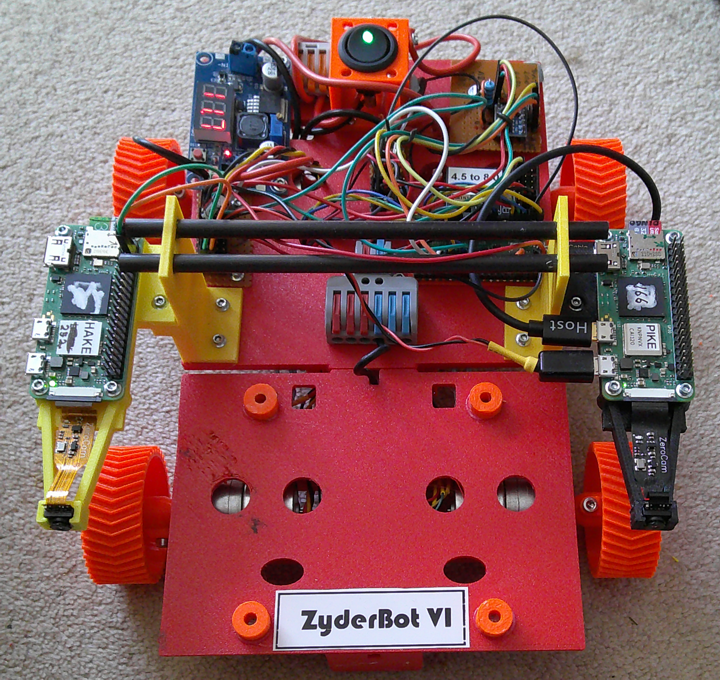
We are re-printing the ZyderBot robot with many improvements. The new Bambu Lab P1S is awesomely fast and produces beautiful prints.
Toxic Barrels
We have printed some sample barrels for the Eco-Disaster challenge. Hopefully we can get some green that isn't fluorescent and translucent to practice with later (Thanks Phil :)
Onwards and Upwards
We are entering PiWars 2024. The 2022 entry will form the basis, so Zyderbot will be:
- Four wheel drive
- Articulated chassis
- Brushless motors
- three 18650 li-ion batteries
- 80mm square attachment interface
- Raspberry Pi(s) for autonomous
- Raspberry Pico controller(s)
- Hobby radio control
- Various 3D printed wheels
- Optical object detection
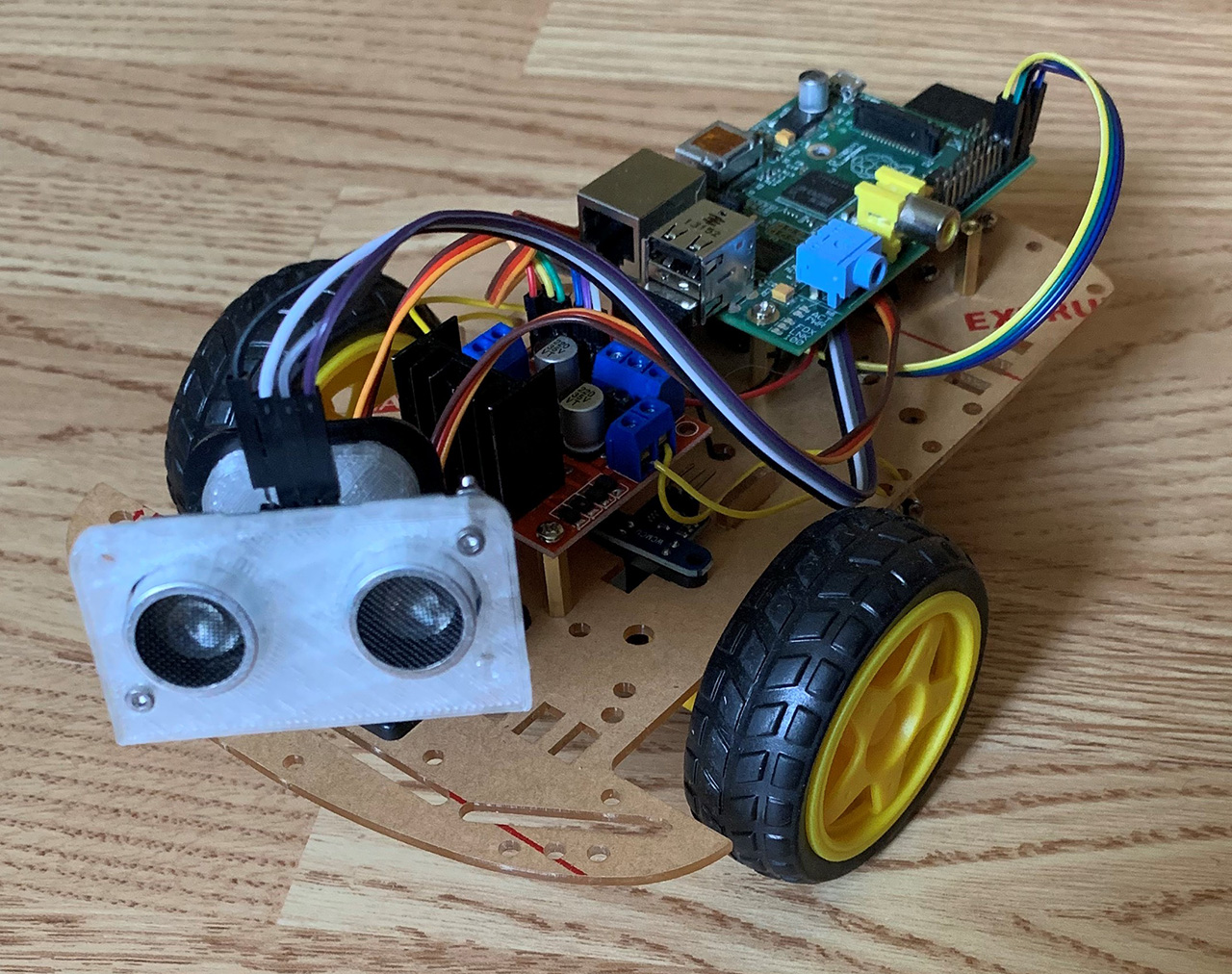
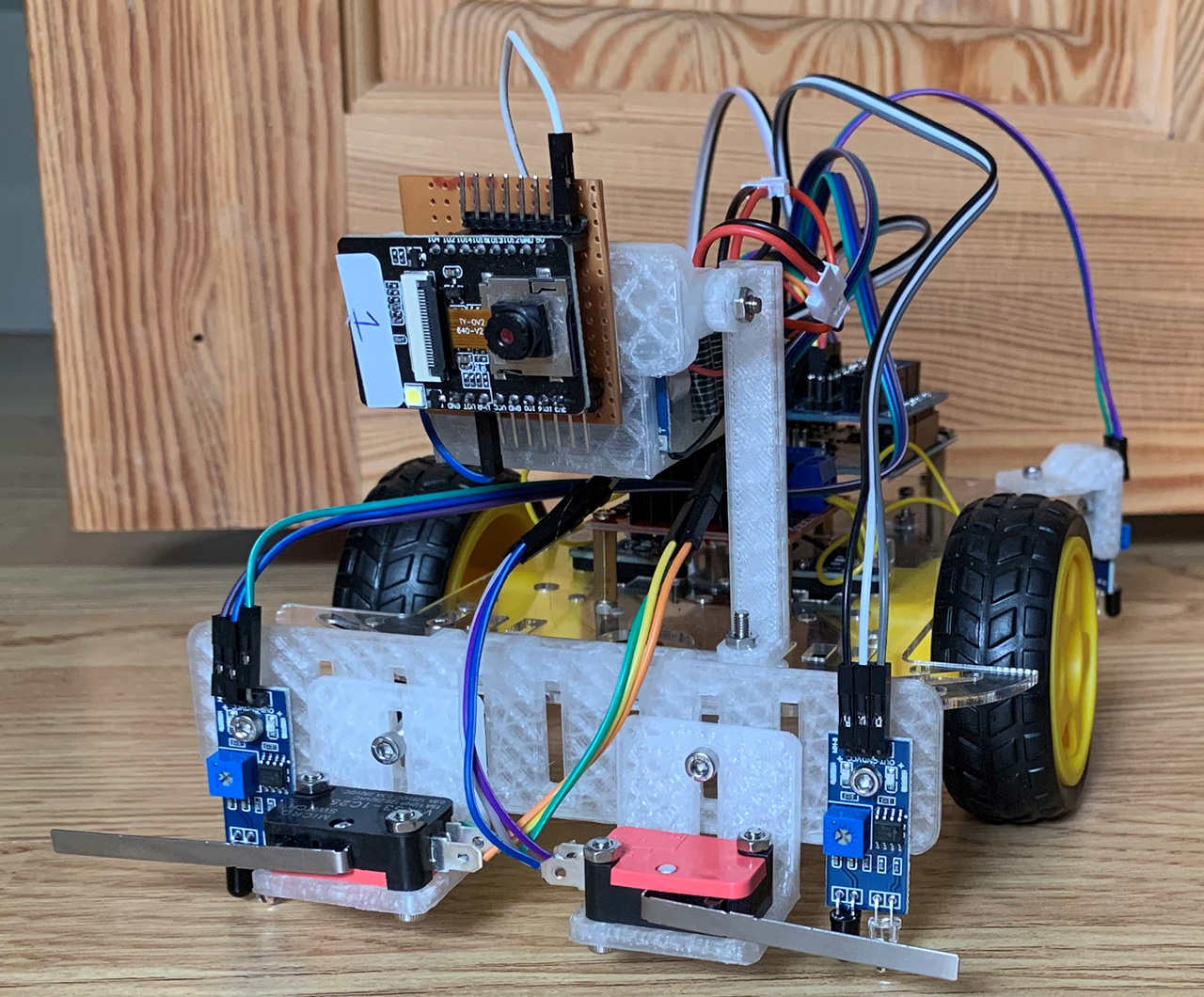
Here is what we have so far
Previously ...
We Did It!
These are our entries for Pi Wars 2022 (best viewed full screen)
You are asked to submit five 5-minute videos and a blog1. Artistic and Technical Merit (well ... technical anyway)
2. Shepherd's Pi
The challenge is to herd the sheep into the pen without knocking any of them over, or knocking any wolves over. We only attempted three out of six sheep on each of the three runs because we couldn't get the frame rate out of the camera to move faster. The robot is following the guidelines autonomously.3. Hungry Cattle
The challenge is to deliver 'cattle feed' (actually rice) into the troughs so that they are half full (indicated by a black line). We managed two full runs of three troughs in four minutes, but could not get another run into the five minute time limit. The robot is following the guidelines autonomously. The rotary valves ensure that rice does not get stuck in the opening.4. Farmyard Tours
This is a free form fun thing, but also shows that the robot is not restricted to indoor smooth surfaces, but can take a bit of stick. The robot is remote controlled by A PS3 controller, interpreted by an ESP325. Blog (appears in a new window)
Our Blog6. Nature's Bounty
We didn't get the apple picker ready in time.and here's some stuff we recorded earlier ....
Working out the best route without the rice on board. Timing looks good allowing 4 seconds at each trough for emptying. Jerky motion is because Picamera is too slow to keep up with robot movements, while OpenCV gives you the OLDEST frame in the buffer, which is completely useless. May have time to do multi-threading; may not.
The hardest challenge may well be the trough filling, as you have to shift an awful lot of weight while not doing involuntary handbrake turns, so we are pleased that progress has been made with this. We have had to put brass weights on the back of the robot to counterbalance all that rice
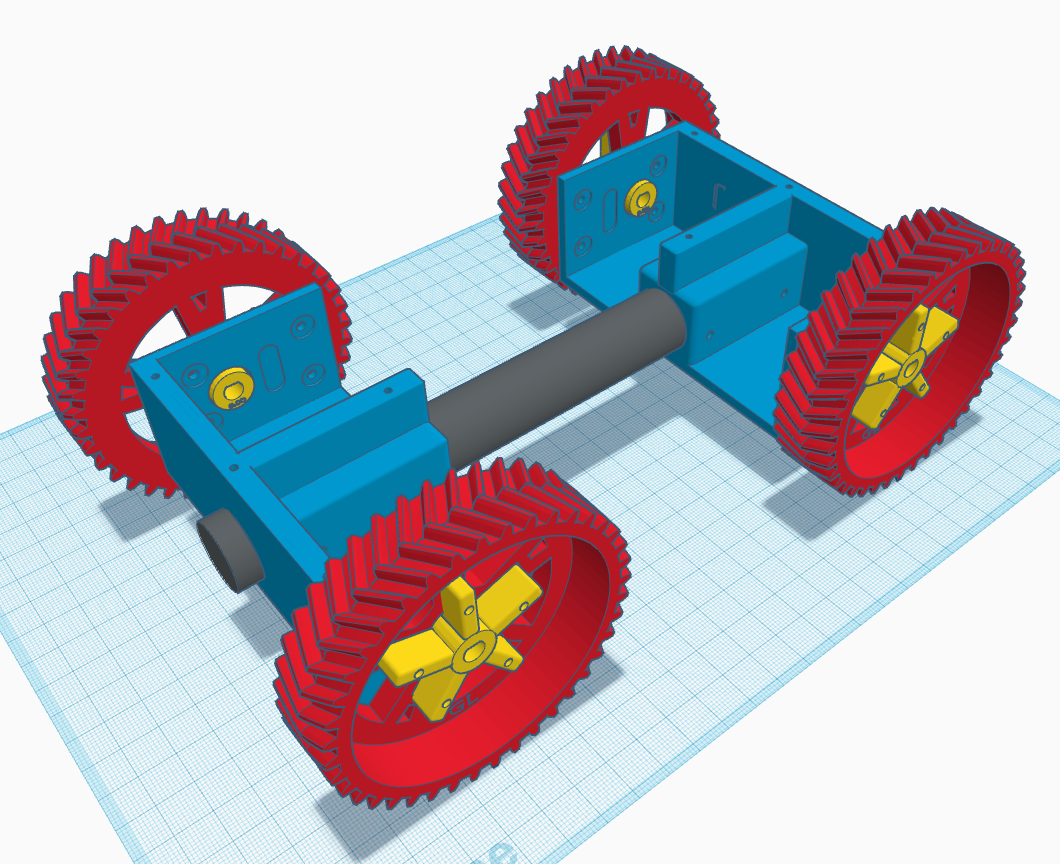
Because there is an agricultural theme we will try to make the robot look like a farm tractor but to get started this is a chassis concept, all 3D printed apart from the carbon fibre tube at the centre, and here is a prototype:
the motors are widely used in electric curtain rails and therefore are available in a huge variety of voltages and gear ratios in the same form factor, so we can swap if amending the wheels does not give enough flexibility
and here's why you need a choice of wheel sizes
Why so much attention to off-roading when 3 of the 4 challenges are indoors?
Basically, we expect a tough competition with every point a struggle. Any chassis will work indoors, but you have to have the same chassis for all 4 challenges, so the outdoors one is the decider
... and here's one I prepared earlier ...
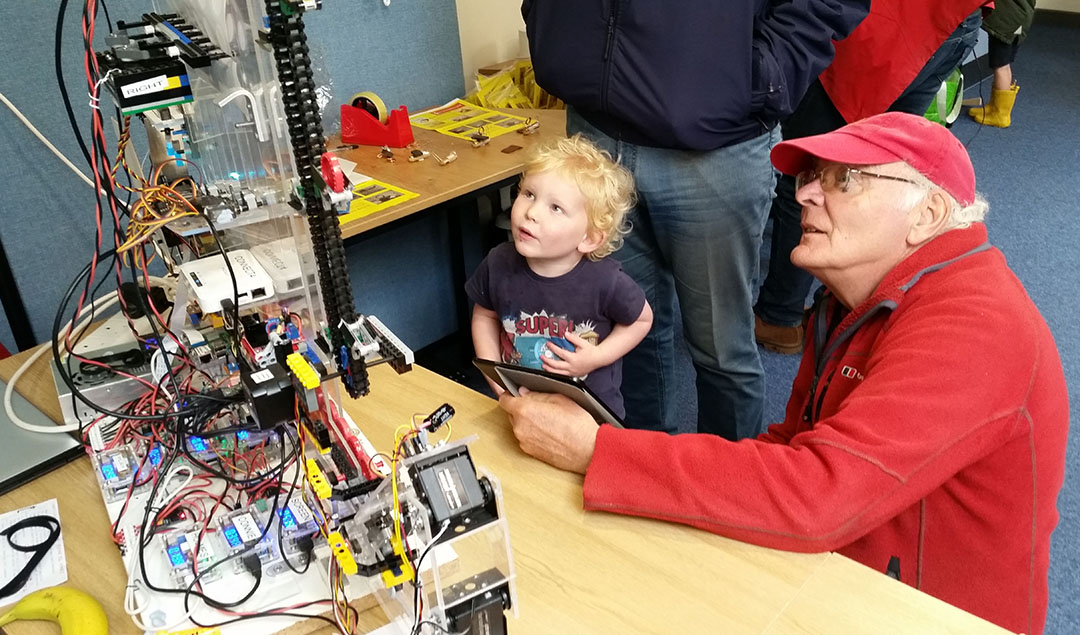
Colin Walls previous robot CONNECT4
This is really 3 robots with the works between two acrylic sheets 8mm apart (hard to see in the photo!):
- the player takes actual Connect4 counters from the hoist and plays them into slots
- the sorter sorts the counters from the previous game into red and yellow
- the lifter puts alternate red and yellow onto the hoist
- the player is an AI self-trained neural network which learned by playing itself virtually thousands of times and yes, it has actually beaten a human (well, a 7 year old)
- the three Raspberry PIs communicate through a MySQL database via WiFi
- human opponents connect to the same WiFi to make their moves on a web page
- it was in the window of Fields department store as an advert for Sidmouth Science Festival 2019
- it was originally made from Lego and acrylic cut with band-saw and pillar drill, but is being redesigned for laser cutting, 3D printing, and tidier wiring
Colin Walls previous robot PANDA
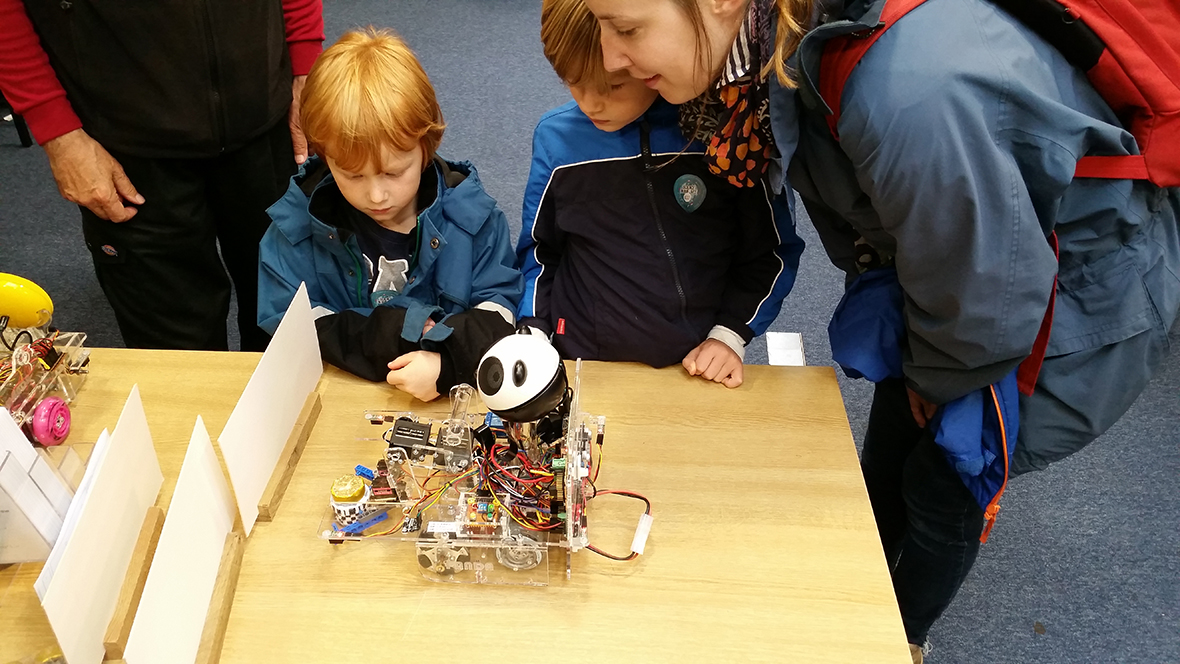
The Pyrotechnics And Nasties Disposal Automaton finds a lit bomb (by its checker pattern), picks it up, and extinguishes it by dropping it over the side of the table into a bucket of water
For more of Colin's robots go to https://sidmouthrobots.co.uk/
John Flanagan previous robot 1
John Flanagan previous robot 2
For more of John Flanagan's robots go to https://www.tekyinblack.com/general-projects/robots/